Incremental Pose Graph Optimization
Summary
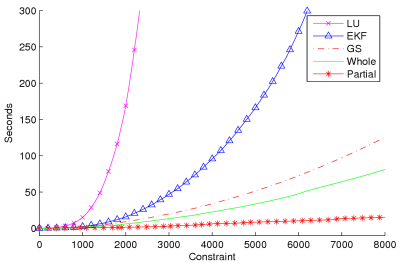
In previous work, we showed how the SLAM problem can be cast as a non-linear optimization problem and presented a solution similar to stochastic gradient descent. We now extend our previous batch solution, allowing new constraints to be added.
Resources

Spatially-Adaptive Learning Rates for Online Incremental SLAM (PDF) (1.6 MB)
Learning rates tree data structure source code (LearningRatesTree.java)
@inproceedings{ Olson-RSS-07,
AUTHOR = {E. Olson and J. Leonard and S. Teller},
TITLE = {Spatially-Adaptive Learning Rates for Online Incremental SLAM},
BOOKTITLE = {Proceedings of Robotics: Science and Systems},
YEAR = {2007},
ADDRESS = {Atlanta, GA, USA},
MONTH = {June}
}
Movies
Processing the Freiburg data set (XVID)
|
Robotics, Vision, and Sensor Networks Group
32 Vassar Street, 32-33xCambridge, MA 02139 Tel: 617-253-6583 Fax: 617-258-7413 |
 |